摘要:
线性变换;齐次坐标变换;矩阵。
(线性)变换
称三维到二维的变换(/发生降维的变换)为投影。
缩放变换: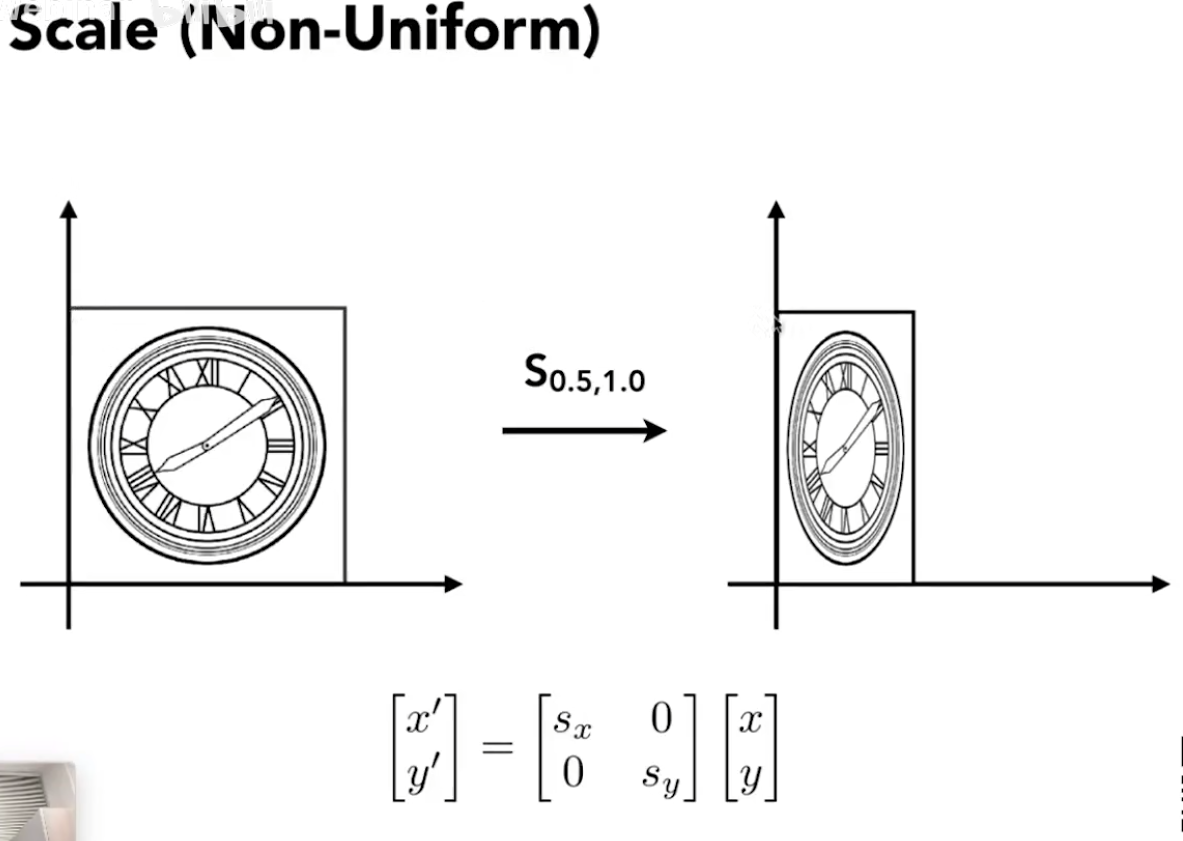
反射变换:例子中为关于y轴进行镜像操作。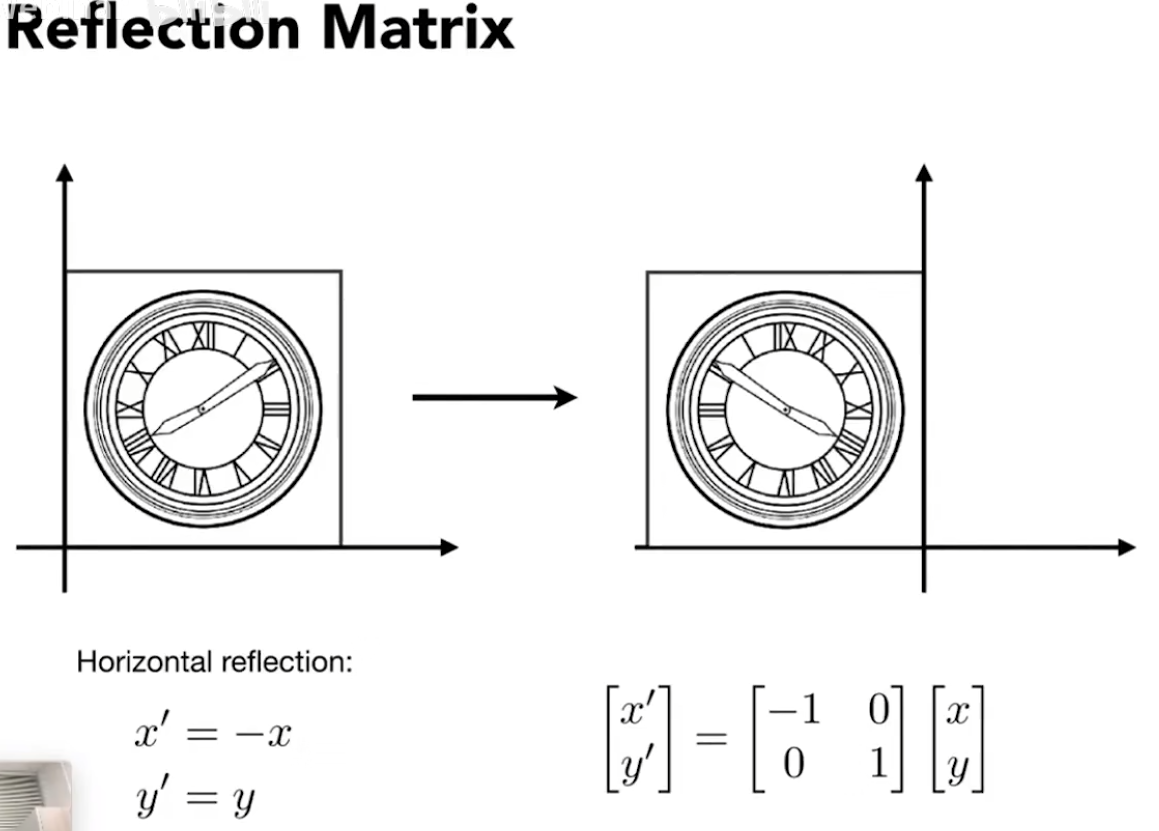
切变:例子中竖直方向不做移动,水平方向上每个点移动ay距离。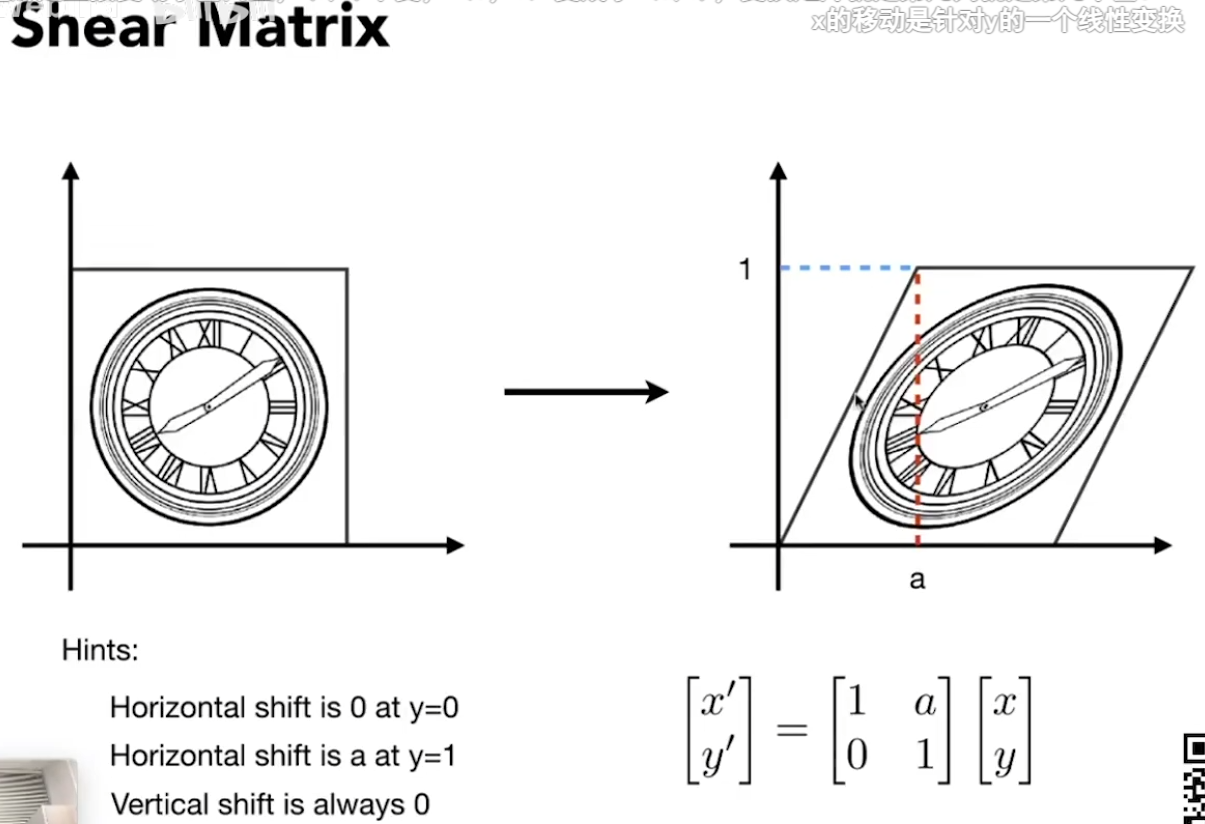
旋转方向默认逆时针旋转。
旋转矩阵的公式推导见下图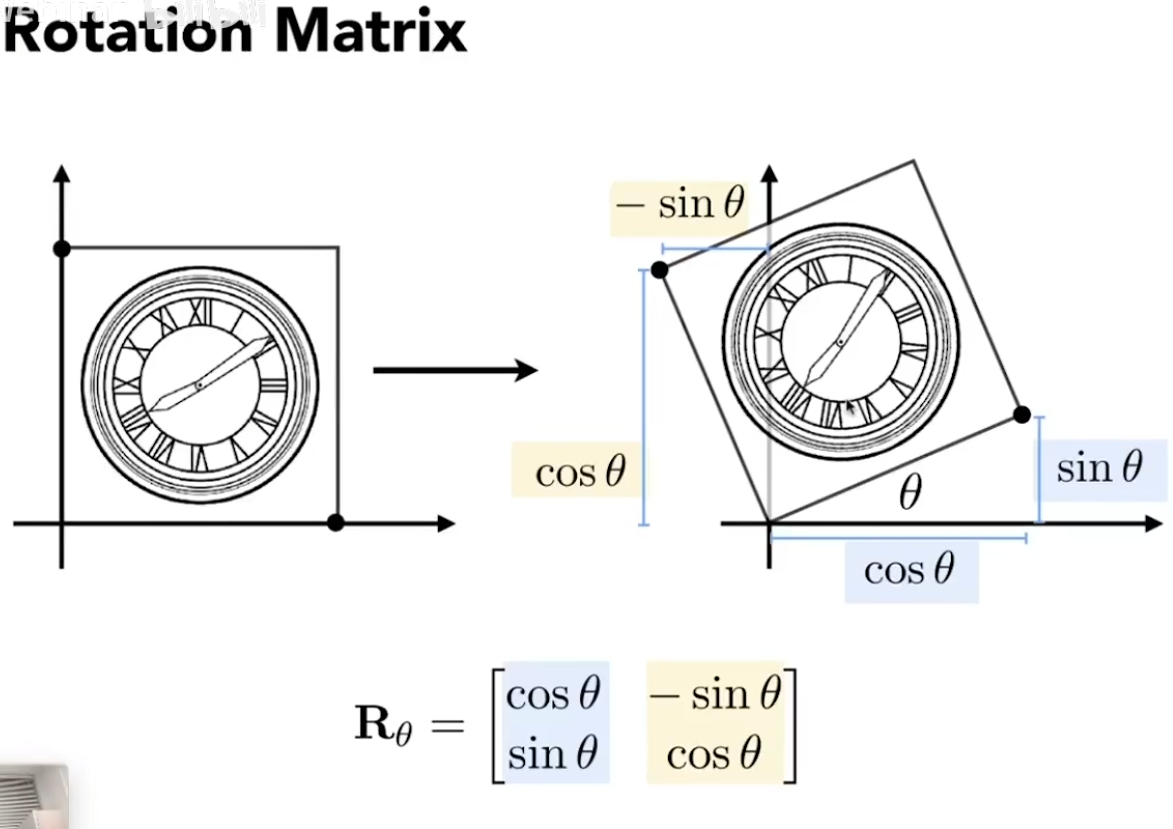
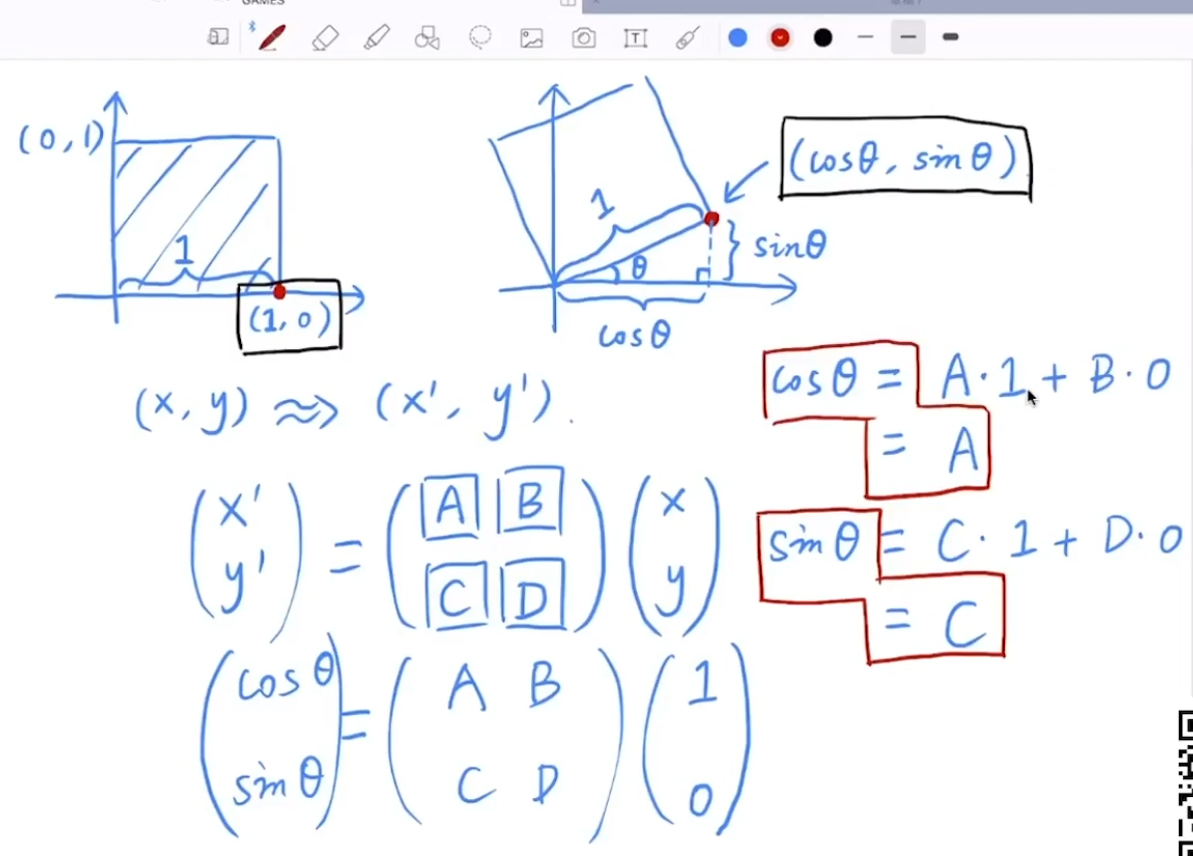
线性变换:坐标点(/向量)能通过左乘矩阵来变换到另一个坐标。要求矩阵的维度与向量相同。
齐次变换
齐次变换目的:找到一种统一的方法来表示各种变换。常规的平移变换不满足线性变换定义。
齐次过程:在原有的向量上增加一个维度,多加入的一个维度用于存放矩阵的平移变换。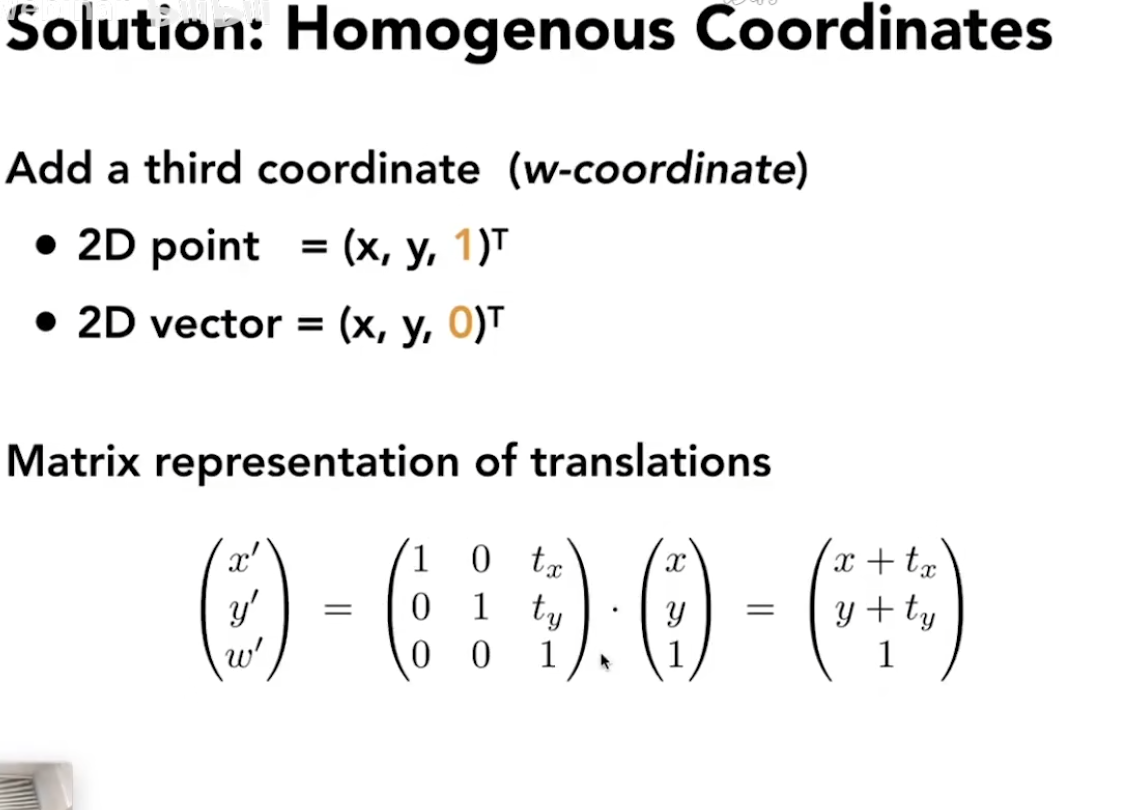
注意到,向量在进行齐次变换时,增加一个维度的值为0而非1,这用于反映向量的平移不变性,保护向量的值在经过平移变换后不发生改变。若齐次变换的对象为点坐标,则增加维度的值为1。
这种设置下,也保证了齐次坐标中的“向量+向量”、“点-点”、“点+向量”操作是自恰的。其中“点+点”表示两点之间的中点,可以缩放增加的维度为1来将点坐标合理化。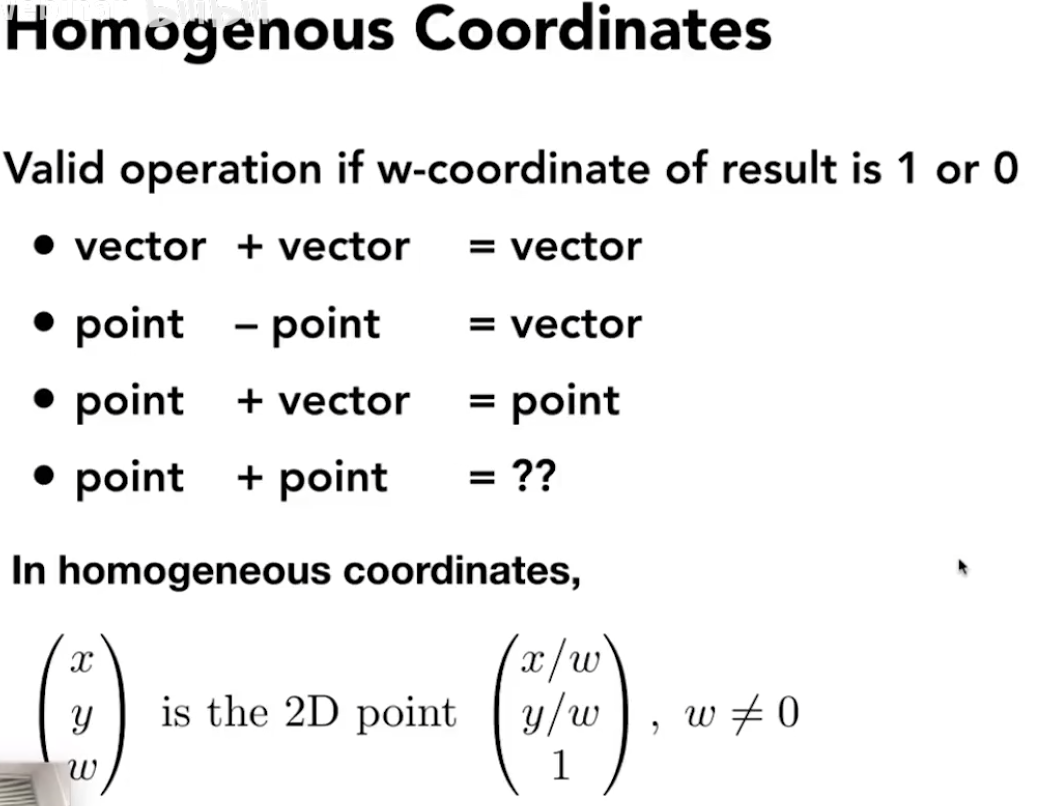
仿射变换 = 线性变换(缩放、轴对称、切变、旋转) + 平移变换。这些变换均能写为齐次变换。
仿射:在这种变换下,原始对象的某些几何性质(如平行性、共线性)会被保留。
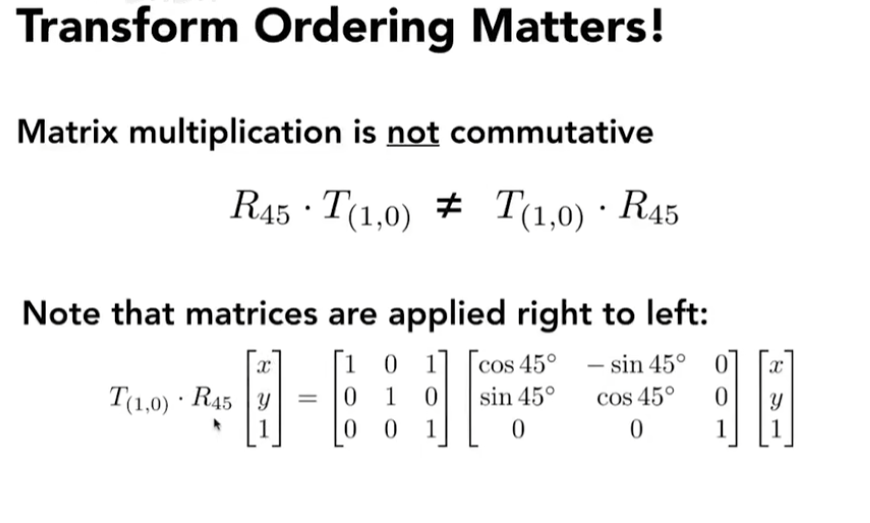
图例的变换过程是先旋转45°,再水平平移一个单位,以变换的顺序强调矩阵乘法不满足交换律。由此得到的矩阵仍为3*3,即多次齐次变换可以合并成一次复杂的、不变维的变换(重要性质,涉及矩阵压缩?)。