摘要:
三维变换;视图变换;投影变换;矩阵。
三维变换
三维绕轴旋转公式: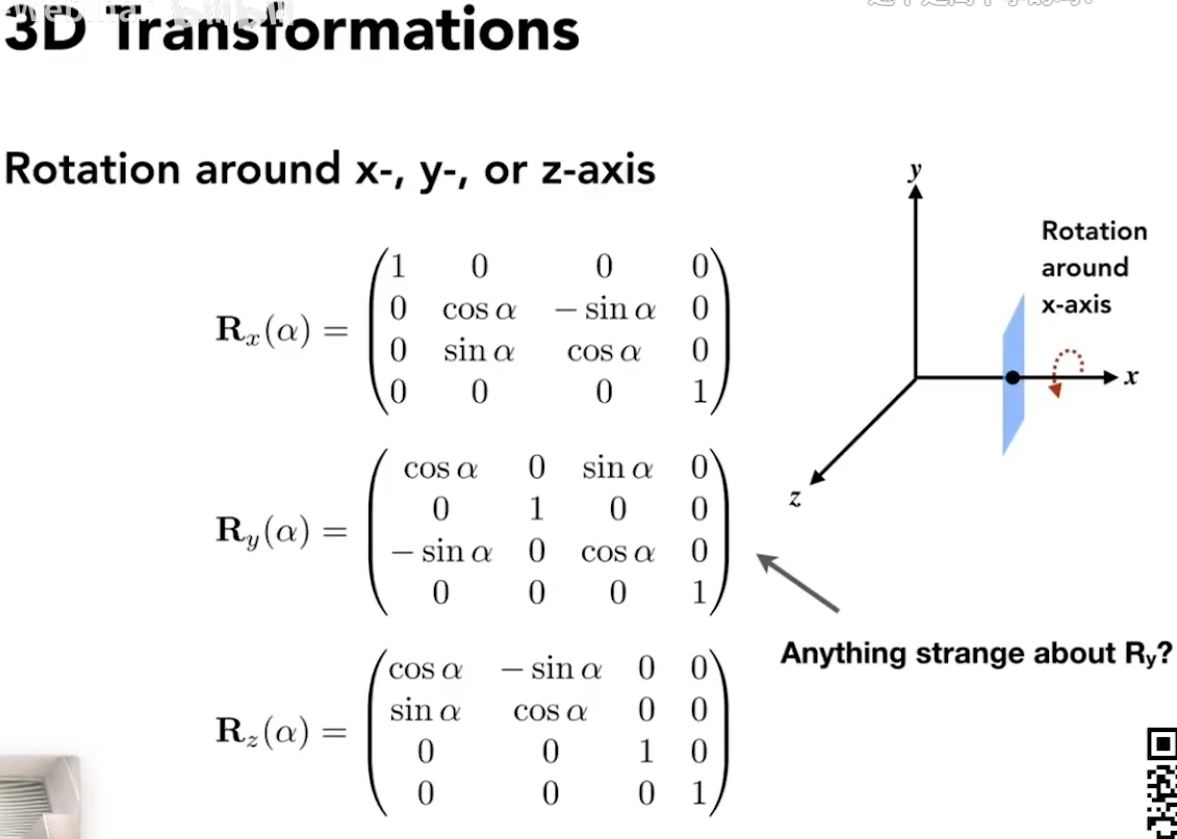
这里Ry有点不一样,是因为绕该轴是z轴叉乘x轴来得到y,按右手定则是z方向转动到x方向,所以其中的旋转量是反的(如果是x转向z,则为正?)。
欧拉角。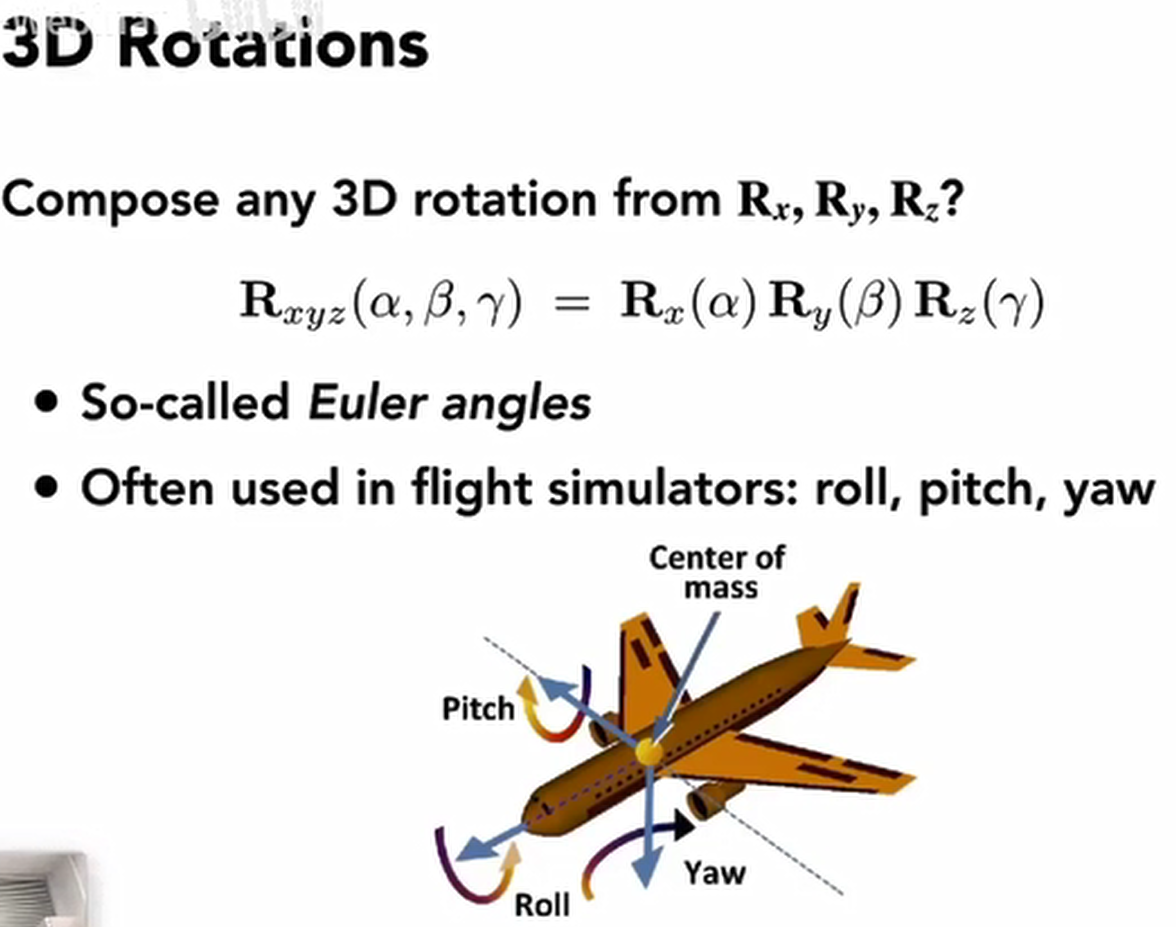
罗德里格斯旋转公式: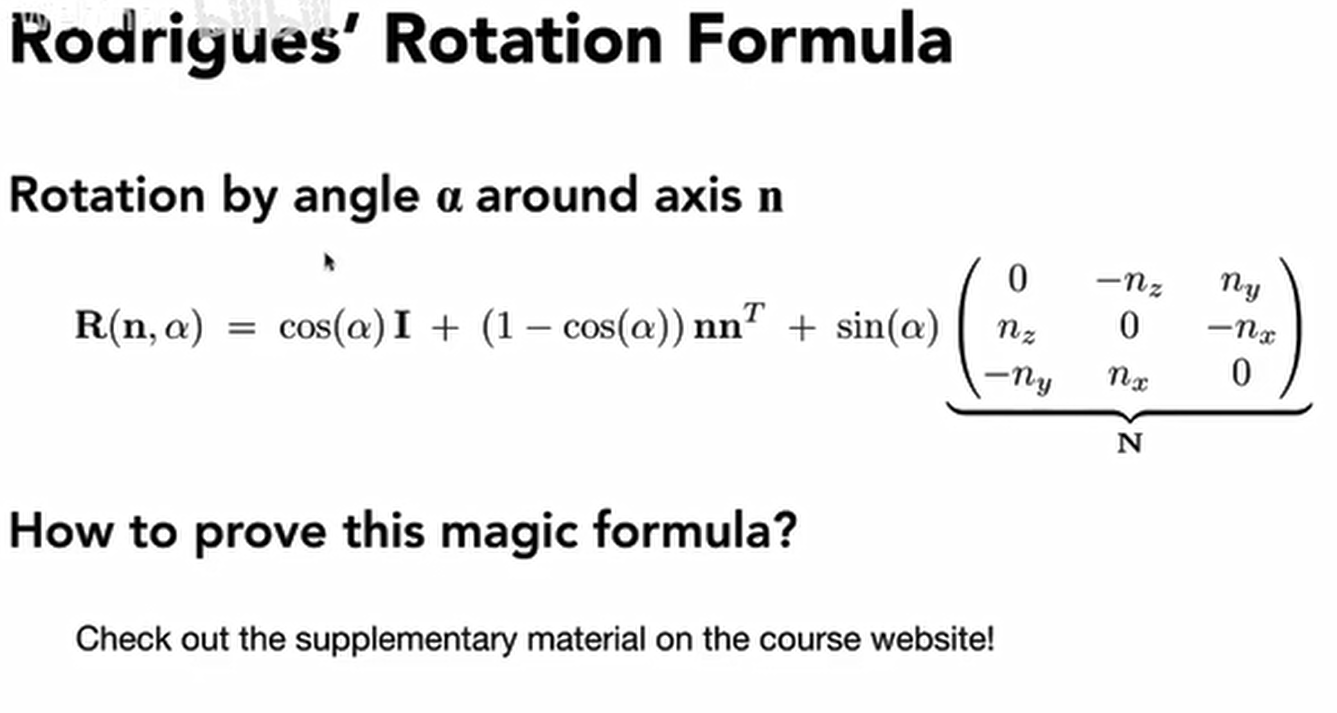
四元数更多是为了用于旋转中的插值。
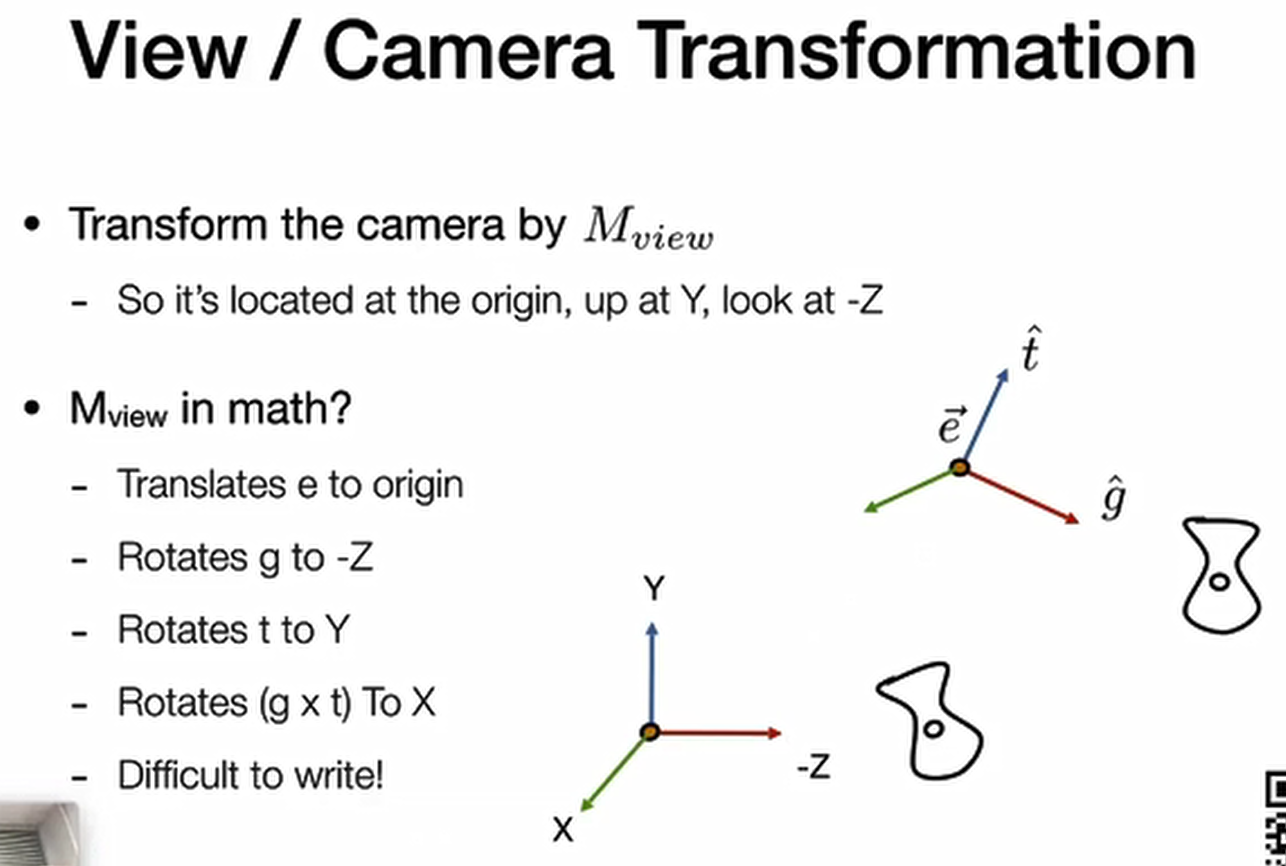
视图变换
定义相机的三个必要参数:相机位置、相机的前方向(确定一个指向轴)、相机的上方向(确定绕前进方向轴的旋转量)。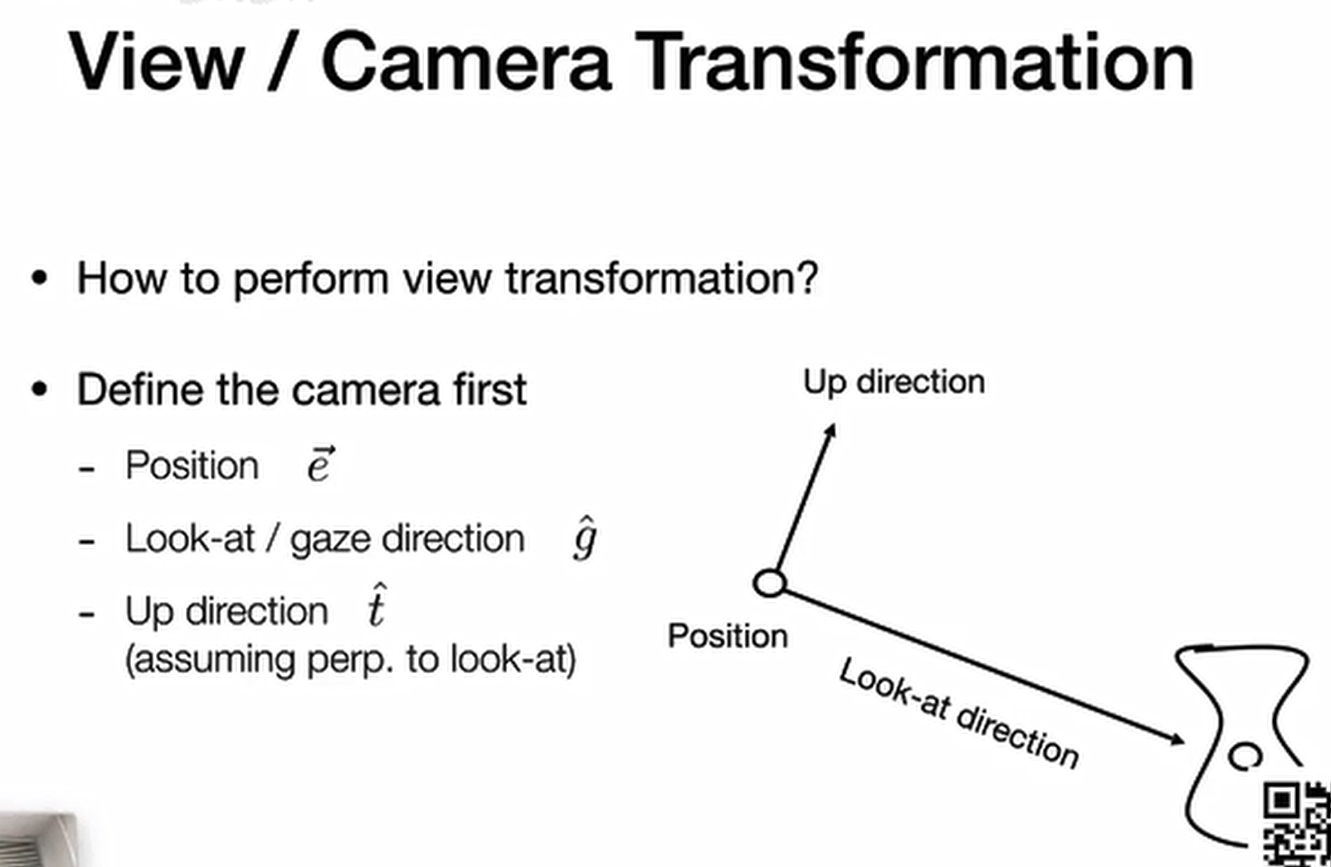
约定俗成中,相机位于坐标原点,前方向为-Z轴,上方向为Y轴。移动操作默认不改变相机位置。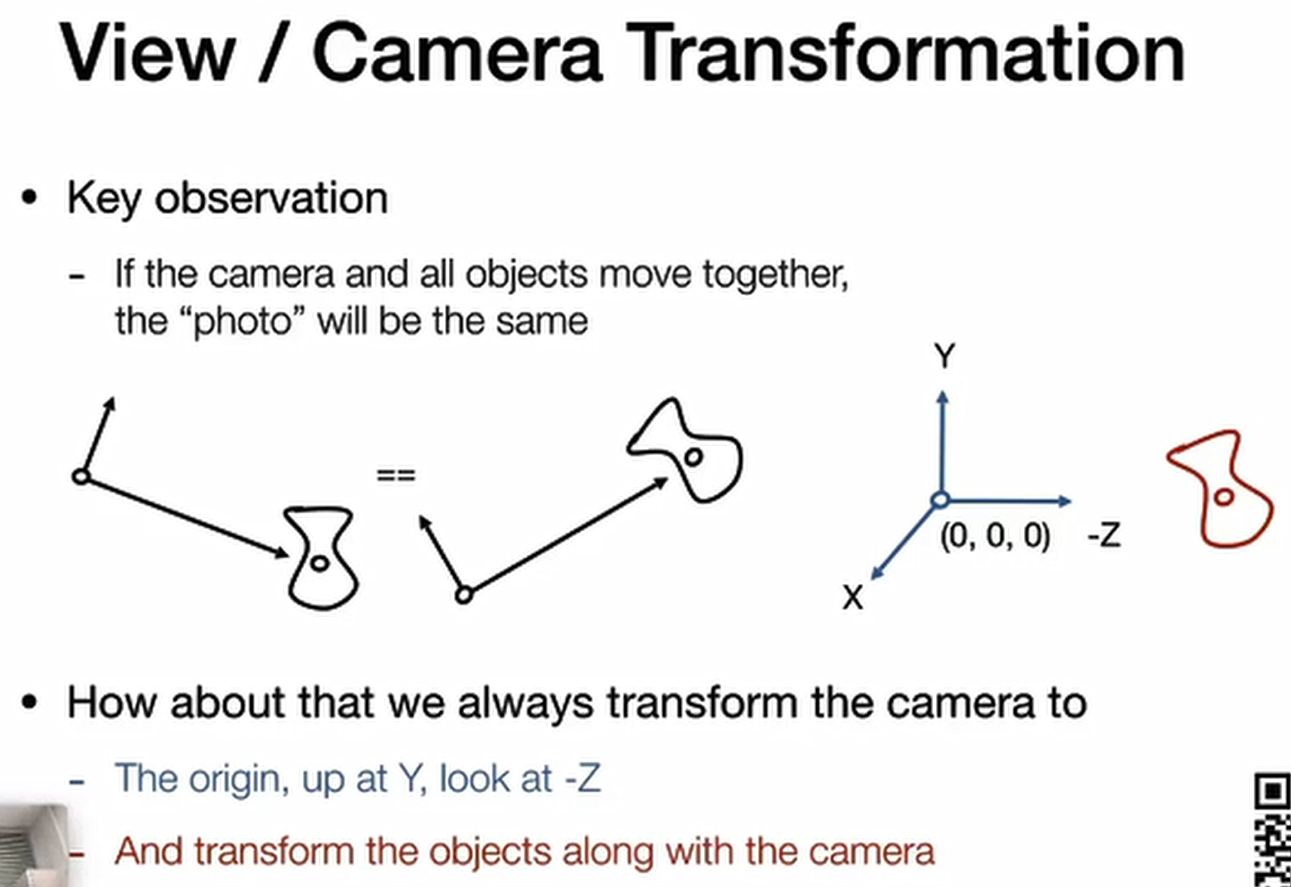
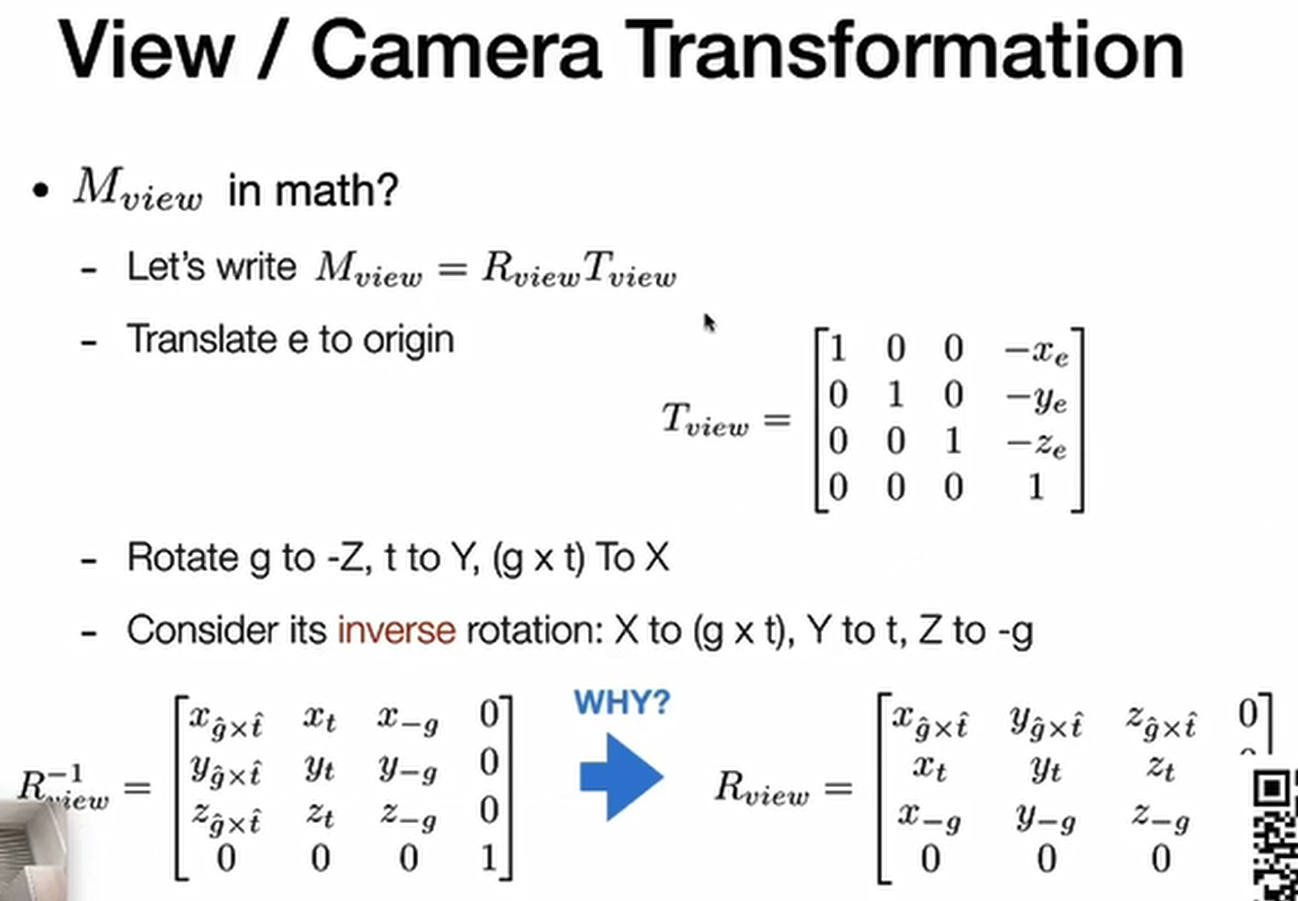
要对相机应用矩阵变换,先把相机恢复到约定俗成的状态。恢复过程中,先应用平移再应用旋转。
旋转矩阵是正交矩阵,通过求逆得到它的转置矩阵。